Track models and datasets
11 minute read
비디오 튜토리얼을 따라해보세요.
Artifacts 에 대하여
그리스의 암포라 와 같이, 아티팩트는 프로세스의 결과물인 생산된 오브젝트입니다. ML에서 가장 중요한 아티팩트는 데이터셋 과 모델 입니다.
그리고 코로나도의 십자가 와 마찬가지로, 이러한 중요한 아티팩트는 박물관에 있어야 합니다. 즉, 카탈로그화 및 구성되어야 합니다. 그래야 여러분, 여러분의 팀, 그리고 더 나아가 ML 커뮤니티가 그것들로부터 배울 수 있습니다. 결국, 트레이닝을 추적하지 않는 사람들은 그것을 반복할 수 밖에 없습니다.
Artifacts API를 사용하면 W&B Run 의 결과물로 Artifact 를 기록하거나, 다음 다이어그램과 같이 Run 에 대한 입력으로 Artifact 를 사용할 수 있습니다.
여기서 트레이닝 run 은 데이터셋을 가져와 모델을 생성합니다.
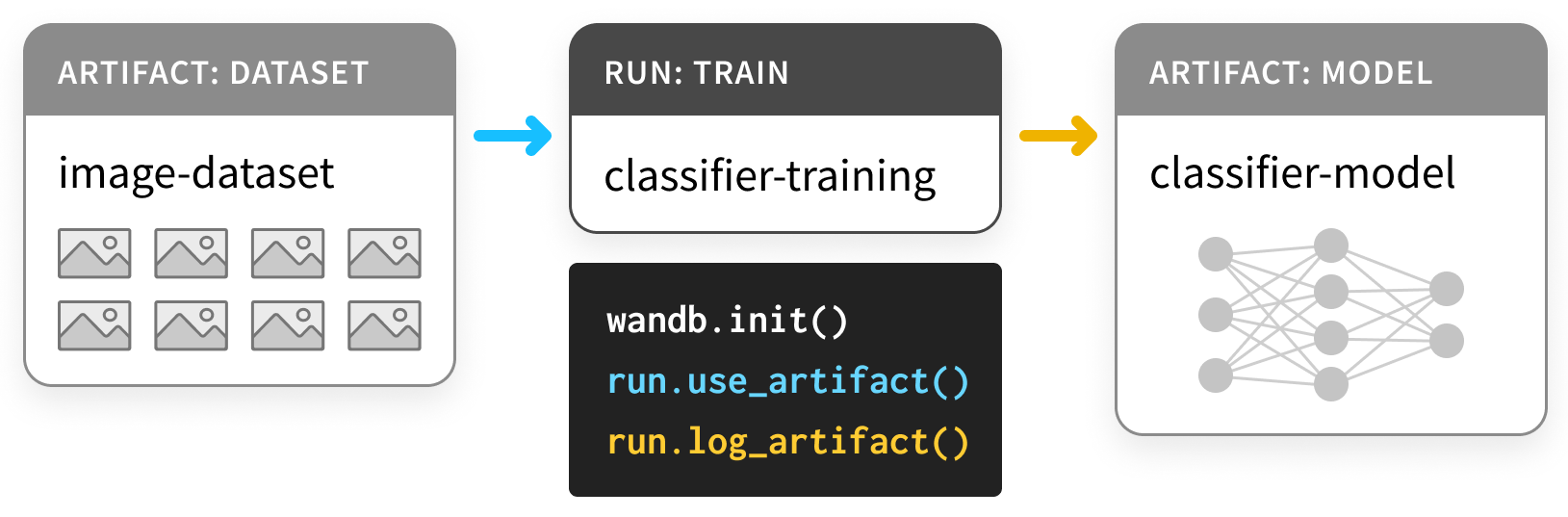
하나의 run 이 다른 run 의 출력을 입력으로 사용할 수 있기 때문에, Artifact 와 Run 은 함께 방향 그래프를 형성합니다. ( Artifact 와 Run 에 대한 노드가 있는 이분 DAG )
그리고 Run 을 소비하거나 생성하는 Artifact 에 연결하는 화살표가 있습니다.
Artifacts 를 사용하여 모델 과 데이터셋 추적하기
설치 및 임포트
Artifacts 는 0.9.2 버전부터 Python 라이브러리의 일부입니다.
ML Python 스택의 대부분과 마찬가지로 pip 를 통해 사용할 수 있습니다.
# Compatible with wandb version 0.9.2+
!pip install wandb -qqq
!apt install tree
import os
import wandb
데이터셋 기록하기
먼저 몇 가지 Artifacts 를 정의해 보겠습니다.
이 예제는 이 PyTorch 를 기반으로 합니다. “Basic MNIST Example”, 그러나 TensorFlow 또는 다른 프레임워크에서, 또는 순수 Python 에서도 쉽게 수행할 수 있습니다.
Dataset 부터 시작하겠습니다.
- 파라미터를 선택하기 위한
train트레이닝 세트, - 하이퍼파라미터를 선택하기 위한
validation검증 세트, - 최종 모델을 평가하기 위한
test테스트 세트
아래의 첫 번째 셀은 이러한 세 가지 데이터셋을 정의합니다.
import random
import torch
import torchvision
from torch.utils.data import TensorDataset
from tqdm.auto import tqdm
# Ensure deterministic behavior
torch.backends.cudnn.deterministic = True
random.seed(0)
torch.manual_seed(0)
torch.cuda.manual_seed_all(0)
# Device configuration
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# Data parameters
num_classes = 10
input_shape = (1, 28, 28)
# drop slow mirror from list of MNIST mirrors
torchvision.datasets.MNIST.mirrors = [mirror for mirror in torchvision.datasets.MNIST.mirrors
if not mirror.startswith("http://yann.lecun.com")]
def load(train_size=50_000):
"""
# Load the data
"""
# the data, split between train and test sets
train = torchvision.datasets.MNIST("./", train=True, download=True)
test = torchvision.datasets.MNIST("./", train=False, download=True)
(x_train, y_train), (x_test, y_test) = (train.data, train.targets), (test.data, test.targets)
# split off a validation set for hyperparameter tuning
x_train, x_val = x_train[:train_size], x_train[train_size:]
y_train, y_val = y_train[:train_size], y_train[train_size:]
training_set = TensorDataset(x_train, y_train)
validation_set = TensorDataset(x_val, y_val)
test_set = TensorDataset(x_test, y_test)
datasets = [training_set, validation_set, test_set]
return datasets
이것은 이 예제에서 반복되는 패턴을 설정합니다.
Artifact 로 데이터를 기록하는 코드는
해당 데이터를 생성하는 코드 주위에 래핑됩니다.
이 경우 데이터를 load 하는 코드는
데이터를 load_and_log 하는 코드와 분리됩니다.
이것은 좋은 방법입니다.
이러한 데이터셋을 Artifacts 로 기록하려면 다음이 필요합니다.
wandb.init으로Run을 생성하고 (L4)- 데이터셋에 대한
Artifact를 생성하고 (L10), - 관련
file을 저장하고 기록합니다 (L20, L23).
아래 코드 셀의 예제를 확인하고 자세한 내용은 나중에 섹션을 확장하십시오.
def load_and_log():
# 🚀 start a run, with a type to label it and a project it can call home
with wandb.init(project="artifacts-example", job_type="load-data") as run:
datasets = load() # separate code for loading the datasets
names = ["training", "validation", "test"]
# 🏺 create our Artifact
raw_data = wandb.Artifact(
"mnist-raw", type="dataset",
description="Raw MNIST dataset, split into train/val/test",
metadata={"source": "torchvision.datasets.MNIST",
"sizes": [len(dataset) for dataset in datasets]})
for name, data in zip(names, datasets):
# 🐣 Store a new file in the artifact, and write something into its contents.
with raw_data.new_file(name + ".pt", mode="wb") as file:
x, y = data.tensors
torch.save((x, y), file)
# ✍️ Save the artifact to W&B.
run.log_artifact(raw_data)
load_and_log()
wandb.init
Artifact 를 생성할 Run 을 만들 때,
어떤 project 에 속하는지 명시해야 합니다.
워크플로우에 따라
프로젝트는 car-that-drives-itself 만큼 클 수도 있고
iterative-architecture-experiment-117 만큼 작을 수도 있습니다.
👍 규칙: 가능하다면
Artifact를 공유하는 모든Run을 단일 프로젝트 안에 보관하십시오. 이렇게 하면 간단하게 유지되지만 걱정하지 마십시오.Artifact는 프로젝트 간에 이동할 수 있습니다.
실행할 수 있는 모든 종류의 작업을 추적하는 데 도움이 되도록
Runs 를 만들 때 job_type 을 제공하는 것이 유용합니다.
이렇게 하면 Artifacts 그래프가 깔끔하게 유지됩니다.
👍 규칙:
job_type은 설명적이어야 하며 파이프라인의 단일 단계에 해당해야 합니다. 여기서는 데이터를load하는 것과 데이터를preprocess하는 것을 분리합니다.
wandb.Artifact
무언가를 Artifact 로 기록하려면 먼저 Artifact 오브젝트를 만들어야 합니다.
모든 Artifact 에는 name 이 있습니다. 이것이 첫 번째 인수를 설정하는 것입니다.
👍 규칙:
name은 설명적이어야 하지만 기억하고 입력하기 쉬워야 합니다. 코드에서 하이픈으로 구분되고 변수 이름에 해당하는 이름을 사용하는 것을 좋아합니다.
또한 type 이 있습니다. Run 에 대한 job_type 과 마찬가지로
이것은 Run 과 Artifact 의 그래프를 구성하는 데 사용됩니다.
👍 규칙:
type은 간단해야 합니다.mnist-data-YYYYMMDD보다dataset또는model과 같아야 합니다.
description 과 일부 metadata 를 사전으로 첨부할 수도 있습니다.
metadata 는 JSON 으로 직렬화할 수 있어야 합니다.
👍 규칙:
metadata는 가능한 한 설명적이어야 합니다.
artifact.new_file 및 run.log_artifact
Artifact 오브젝트를 만들었으면 파일을 추가해야 합니다.
제대로 읽으셨습니다. files 입니다.
Artifact 는 디렉토리와 같이 구성되어 있으며
파일과 하위 디렉토리가 있습니다.
👍 규칙: 그렇게 하는 것이 합리적일 때마다 내용을
Artifact에서 여러 파일로 분할하십시오. 이렇게 하면 확장할 때 도움이 됩니다.
new_file 메소드를 사용합니다.
파일을 동시에 쓰고 Artifact 에 첨부합니다.
아래에서는 add_file 메소드를 사용합니다.
이 두 단계를 분리합니다.
모든 파일을 추가했으면 wandb.ai 에 log_artifact 해야 합니다.
출력에 일부 URL 이 나타나는 것을 알 수 있습니다.
Run 페이지에 대한 URL 을 포함합니다.
거기에서 기록된 Artifact 를 포함하여 Run 의 결과를 볼 수 있습니다.
아래에서 Run 페이지의 다른 구성 요소를 더 잘 활용하는 몇 가지 예를 볼 수 있습니다.
기록된 데이터셋 Artifact 사용
박물관의 Artifact 와 달리 W&B 의 Artifact 는
단순히 저장되는 것이 아니라 사용 되도록 설계되었습니다.
그것이 어떻게 보이는지 살펴 보겠습니다.
아래 셀은 원시 데이터셋을 가져오는 파이프라인 단계를 정의합니다.
이를 사용하여 정규화 되고 올바르게 형성된 preprocess 된 데이터셋을 생성합니다.
다시 말하지만 코드의 핵심인 preprocess 를 wandb 와 인터페이스하는 코드와 분리했습니다.
def preprocess(dataset, normalize=True, expand_dims=True):
"""
## Prepare the data
"""
x, y = dataset.tensors
if normalize:
# Scale images to the [0, 1] range
x = x.type(torch.float32) / 255
if expand_dims:
# Make sure images have shape (1, 28, 28)
x = torch.unsqueeze(x, 1)
return TensorDataset(x, y)
이제 wandb.Artifact 로깅으로 이 preprocess 단계를 계측하는 코드입니다.
아래 예제는 Artifact 를 use 하고
새로운 기능이며,
log 합니다.
마지막 단계와 동일합니다.
Artifact 는 Run 의 입력과 출력 모두입니다.
새로운 job_type 인 preprocess-data 를 사용합니다.
이것이 이전 작업과는 다른 종류의 작업임을 분명히 하기 위해서입니다.
def preprocess_and_log(steps):
with wandb.init(project="artifacts-example", job_type="preprocess-data") as run:
processed_data = wandb.Artifact(
"mnist-preprocess", type="dataset",
description="Preprocessed MNIST dataset",
metadata=steps)
# ✔️ declare which artifact we'll be using
raw_data_artifact = run.use_artifact('mnist-raw:latest')
# 📥 if need be, download the artifact
raw_dataset = raw_data_artifact.download()
for split in ["training", "validation", "test"]:
raw_split = read(raw_dataset, split)
processed_dataset = preprocess(raw_split, **steps)
with processed_data.new_file(split + ".pt", mode="wb") as file:
x, y = processed_dataset.tensors
torch.save((x, y), file)
run.log_artifact(processed_data)
def read(data_dir, split):
filename = split + ".pt"
x, y = torch.load(os.path.join(data_dir, filename))
return TensorDataset(x, y)
여기서 주목해야 할 점은 전처리 steps 가
metadata 로 preprocessed_data 와 함께 저장된다는 것입니다.
experiment 를 재현 가능하게 만들려고 하는 경우 많은 메타데이터를 캡처하는 것이 좋습니다.
또한 데이터셋이 “large artifact” 임에도 불구하고
download 단계는 1 초 이내에 완료됩니다.
자세한 내용은 아래의 마크다운 셀을 확장하십시오.
steps = {"normalize": True,
"expand_dims": True}
preprocess_and_log(steps)
run.use_artifact
이러한 단계는 더 간단합니다. 소비자는 Artifact 의 name 과 약간 더 많은 것을 알아야 합니다.
그 “약간 더 많은 것” 은 원하는 특정 버전의 Artifact 의 alias 입니다.
기본적으로 마지막으로 업로드된 버전에는 latest 라는 태그가 지정됩니다.
그렇지 않으면 v0 / v1 등으로 이전 버전을 선택하거나
best 또는 jit-script 와 같은 사용자 정의 에일리어스를 제공할 수 있습니다.
Docker Hub 태그와 마찬가지로
에일리어스는 : 로 이름과 구분되므로
원하는 Artifact 는 mnist-raw:latest 입니다.
👍 규칙: 에일리어스를 짧고 간단하게 유지하십시오. 일부 속성을 충족하는
Artifact를 원할 때latest또는best와 같은 사용자 정의alias를 사용하십시오.
artifact.download
이제 download 호출에 대해 걱정할 수도 있습니다.
다른 복사본을 다운로드하면 메모리 부담이 두 배가 되지 않습니까?
걱정하지 마십시오. 실제로 다운로드하기 전에
올바른 버전을 로컬에서 사용할 수 있는지 확인합니다.
이것은 토렌트 와 git 를 사용한 버전 관리 의 기본이 되는 동일한 기술을 사용합니다. 해싱.
Artifact 가 생성되고 기록되면
작업 디렉토리의 artifacts 라는 폴더가
각 Artifact 에 대해 하나씩 하위 디렉토리로 채워지기 시작합니다.
!tree artifacts 로 내용을 확인하세요.
!tree artifacts
Artifacts 페이지
이제 Artifact 를 기록하고 사용했으므로
Run 페이지에서 Artifacts 탭을 확인해 보겠습니다.
wandb 출력에서 Run 페이지 URL 로 이동합니다.
왼쪽 사이드바에서 “Artifacts” 탭을 선택합니다.
(하키 퍽 세 개가 서로 쌓여 있는 것처럼 보이는 데이터베이스 아이콘이 있는 탭입니다).
입력 Artifacts 테이블 또는
출력 Artifacts 테이블에서 행을 클릭한 다음
Artifact 에 대해 기록된 모든 내용을 보려면
탭 (개요, 메타데이터) 를 확인하십시오.
특히 그래프 보기 가 마음에 듭니다.
기본적으로 Artifact 의 type 과
Run 의 job_type 이 두 가지 유형의 노드로 있는 그래프를 보여줍니다.
소비 및 생산을 나타내는 화살표가 있습니다.
모델 기록하기
API 가 Artifact 에 어떻게 작용하는지 알 수 있을 만큼 충분하지만
이 예제를 파이프라인의 끝까지 따라가면
Artifact 가 ML 워크플로우를 어떻게 개선할 수 있는지 알 수 있습니다.
여기 첫 번째 셀은 PyTorch 에서 DNN model 을 빌드합니다. 매우 간단한 ConvNet 입니다.
먼저 model 을 초기화하기만 하고 트레이닝하지는 않습니다.
이렇게 하면 다른 모든 것을 일정하게 유지하면서 트레이닝을 반복할 수 있습니다.
from math import floor
import torch.nn as nn
class ConvNet(nn.Module):
def __init__(self, hidden_layer_sizes=[32, 64],
kernel_sizes=[3],
activation="ReLU",
pool_sizes=[2],
dropout=0.5,
num_classes=num_classes,
input_shape=input_shape):
super(ConvNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(in_channels=input_shape[0], out_channels=hidden_layer_sizes[0], kernel_size=kernel_sizes[0]),
getattr(nn, activation)(),
nn.MaxPool2d(kernel_size=pool_sizes[0])
)
self.layer2 = nn.Sequential(
nn.Conv2d(in_channels=hidden_layer_sizes[0], out_channels=hidden_layer_sizes[-1], kernel_size=kernel_sizes[-1]),
getattr(nn, activation)(),
nn.MaxPool2d(kernel_size=pool_sizes[-1])
)
self.layer3 = nn.Sequential(
nn.Flatten(),
nn.Dropout(dropout)
)
fc_input_dims = floor((input_shape[1] - kernel_sizes[0] + 1) / pool_sizes[0]) # layer 1 output size
fc_input_dims = floor((fc_input_dims - kernel_sizes[-1] + 1) / pool_sizes[-1]) # layer 2 output size
fc_input_dims = fc_input_dims*fc_input_dims*hidden_layer_sizes[-1] # layer 3 output size
self.fc = nn.Linear(fc_input_dims, num_classes)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.fc(x)
return x
여기서는 W&B 를 사용하여 run 을 추적하고 있습니다.
따라서 wandb.config
오브젝트를 사용하여 모든 하이퍼파라미터를 저장합니다.
해당 config 오브젝트의 dict 사전 버전은 매우 유용한 metadata 이므로 반드시 포함하십시오.
def build_model_and_log(config):
with wandb.init(project="artifacts-example", job_type="initialize", config=config) as run:
config = wandb.config
model = ConvNet(**config)
model_artifact = wandb.Artifact(
"convnet", type="model",
description="Simple AlexNet style CNN",
metadata=dict(config))
torch.save(model.state_dict(), "initialized_model.pth")
# ➕ another way to add a file to an Artifact
model_artifact.add_file("initialized_model.pth")
wandb.save("initialized_model.pth")
run.log_artifact(model_artifact)
model_config = {"hidden_layer_sizes": [32, 64],
"kernel_sizes": [3],
"activation": "ReLU",
"pool_sizes": [2],
"dropout": 0.5,
"num_classes": 10}
build_model_and_log(model_config)
artifact.add_file
데이터셋 로깅 예제에서와 같이
new_file 을 동시에 작성하고 Artifact 에 추가하는 대신
한 단계로 파일을 작성할 수도 있습니다.
(여기서는 torch.save )
그런 다음 다른 단계에서 Artifact 에 add 합니다.
👍 규칙: 중복을 방지하기 위해 가능하면
new_file을 사용하십시오.
기록된 모델 Artifact 사용
dataset 에서 use_artifact 를 호출할 수 있는 것과 마찬가지로
initialized_model 에서 호출하여
다른 Run 에서 사용할 수 있습니다.
이번에는 model 을 train 해 보겠습니다.
자세한 내용은 다음 Colab 을 확인하십시오. PyTorch 로 W&B 계측.
import torch.nn.functional as F
def train(model, train_loader, valid_loader, config):
optimizer = getattr(torch.optim, config.optimizer)(model.parameters())
model.train()
example_ct = 0
for epoch in range(config.epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.cross_entropy(output, target)
loss.backward()
optimizer.step()
example_ct += len(data)
if batch_idx % config.batch_log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0%})]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
batch_idx / len(train_loader), loss.item()))
train_log(loss, example_ct, epoch)
# evaluate the model on the validation set at each epoch
loss, accuracy = test(model, valid_loader)
test_log(loss, accuracy, example_ct, epoch)
def test(model, test_loader):
model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device)
output = model(data)
test_loss += F.cross_entropy(output, target, reduction='sum') # sum up batch loss
pred = output.argmax(dim=1, keepdim=True) # get the index of the max log-probability
correct += pred.eq(target.view_as(pred)).sum()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
return test_loss, accuracy
def train_log(loss, example_ct, epoch):
loss = float(loss)
# where the magic happens
wandb.log({"epoch": epoch, "train/loss": loss}, step=example_ct)
print(f"Loss after " + str(example_ct).zfill(5) + f" examples: {loss:.3f}")
def test_log(loss, accuracy, example_ct, epoch):
loss = float(loss)
accuracy = float(accuracy)
# where the magic happens
wandb.log({"epoch": epoch, "validation/loss": loss, "validation/accuracy": accuracy}, step=example_ct)
print(f"Loss/accuracy after " + str(example_ct).zfill(5) + f" examples: {loss:.3f}/{accuracy:.3f}")
이번에는 두 개의 개별 Artifact 생성 Run 을 실행합니다.
첫 번째가 model 트레이닝을 마치면
second 는 trained-model Artifact 를 소비합니다.
test_dataset 에서 성능을 evaluate 합니다.
또한 네트워크가 가장 혼란스러워하는 32 개의 예를 가져옵니다.
categorical_crossentropy 가 가장 높은 예입니다.
이것은 데이터셋과 모델의 문제를 진단하는 좋은 방법입니다.
def evaluate(model, test_loader):
"""
## Evaluate the trained model
"""
loss, accuracy = test(model, test_loader)
highest_losses, hardest_examples, true_labels, predictions = get_hardest_k_examples(model, test_loader.dataset)
return loss, accuracy, highest_losses, hardest_examples, true_labels, predictions
def get_hardest_k_examples(model, testing_set, k=32):
model.eval()
loader = DataLoader(testing_set, 1, shuffle=False)
# get the losses and predictions for each item in the dataset
losses = None
predictions = None
with torch.no_grad():
for data, target in loader:
data, target = data.to(device), target.to(device)
output = model(data)
loss = F.cross_entropy(output, target)
pred = output.argmax(dim=1, keepdim=True)
if losses is None:
losses = loss.view((1, 1))
predictions = pred
else:
losses = torch.cat((losses, loss.view((1, 1))), 0)
predictions = torch.cat((predictions, pred), 0)
argsort_loss = torch.argsort(losses, dim=0)
highest_k_losses = losses[argsort_loss[-k:]]
hardest_k_examples = testing_set[argsort_loss[-k:]][0]
true_labels = testing_set[argsort_loss[-k:]][1]
predicted_labels = predictions[argsort_loss[-k:]]
return highest_k_losses, hardest_k_examples, true_labels, predicted_labels
이러한 로깅 기능은 새로운 Artifact 기능을 추가하지 않으므로
주석을 달지 않겠습니다.
Artifact 를 use 하고 download 하고
log 하고 있습니다.
from torch.utils.data import DataLoader
def train_and_log(config):
with wandb.init(project="artifacts-example", job_type="train", config=config) as run:
config = wandb.config
data = run.use_artifact('mnist-preprocess:latest')
data_dir = data.download()
training_dataset = read(data_dir, "training")
validation_dataset = read(data_dir, "validation")
train_loader = DataLoader(training_dataset, batch_size=config.batch_size)
validation_loader = DataLoader(validation_dataset, batch_size=config.batch_size)
model_artifact = run.use_artifact("convnet:latest")
model_dir = model_artifact.download()
model_path = os.path.join(model_dir, "initialized_model.pth")
model_config = model_artifact.metadata
config.update(model_config)
model = ConvNet(**model_config)
model.load_state_dict(torch.load(model_path))
model = model.to(device)
train(model, train_loader, validation_loader, config)
model_artifact = wandb.Artifact(
"trained-model", type="model",
description="Trained NN model",
metadata=dict(model_config))
torch.save(model.state_dict(), "trained_model.pth")
model_artifact.add_file("trained_model.pth")
wandb.save("trained_model.pth")
run.log_artifact(model_artifact)
return model
def evaluate_and_log(config=None):
with wandb.init(project="artifacts-example", job_type="report", config=config) as run:
data = run.use_artifact('mnist-preprocess:latest')
data_dir = data.download()
testing_set = read(data_dir, "test")
test_loader = torch.utils.data.DataLoader(testing_set, batch_size=128, shuffle=False)
model_artifact = run.use_artifact("trained-model:latest")
model_dir = model_artifact.download()
model_path = os.path.join(model_dir, "trained_model.pth")
model_config = model_artifact.metadata
model = ConvNet(**model_config)
model.load_state_dict(torch.load(model_path))
model.to(device)
loss, accuracy, highest_losses, hardest_examples, true_labels, preds = evaluate(model, test_loader)
run.summary.update({"loss": loss, "accuracy": accuracy})
wandb.log({"high-loss-examples":
[wandb.Image(hard_example, caption=str(int(pred)) + "," + str(int(label)))
for hard_example, pred, label in zip(hardest_examples, preds, true_labels)]})
train_config = {"batch_size": 128,
"epochs": 5,
"batch_log_interval": 25,
"optimizer": "Adam"}
model = train_and_log(train_config)
evaluate_and_log()
[i18n] feedback_title
[i18n] feedback_question
Glad to hear it! Please tell us how we can improve.
Sorry to hear that. Please tell us how we can improve.